Fundacja Rozwoju Kardiochirurgii im. prof. Zbigniewa Religi
ul. Wolności 345a, 41-800 Zabrze


Fundacja Rozwoju Kardiochirurgii im. prof. Zbigniewa Religi
ul. Wolności 345a, 41-800 Zabrze
Proszę podać kwotę darowizny (zł): |
Miło nam poinformować, że Fundacja Rozwoju Kardiochirurgii im. prof. Zbigniewa Religi objęła patronatem akcję edukacyjną "Skonsultuj z Farmaceutą - Choroba Niedokrwienna Serca", której finał odbędzie się 13 kwietnia 2024 r. w Manufakturze w Łodzi.
Jest nam niezmiernie miło poinformować, że 22 kwietnia 2024 r. o godzinie 18.00 w Chorzowskim Centrum Kultury odbędzie się uroczysty jubileusz Rotary Club Katowice. Organizatorzy wybrali naszą Fundację i postanowili całkowity dochód z tego wydarzenia przekazać na wsparcie prowadzonych przez nas prac naukowych.
Z ogromną radością informujemy, iż w wyniku rozmów i wspólnego spojrzenia na szeroko pojęte „czynienie dobra” Fundacja Medora i Fundacja Rozwoju Kardiochirurgii im. prof. Zbigniewa Religi rozpoczynają współpracę.
Zapraszamy na XXII Konferencję BioMedTech Silesia, która odbędzie się w dniach 26-27 kwietnia 2024 r. Tematyka konferencji obejmuje szeroki zakres wiedzy i praktyki dotyczącej medycyny, techniki medycznej oraz zastosowania nauk ścisłych w medycynie i naukach o środowisku.
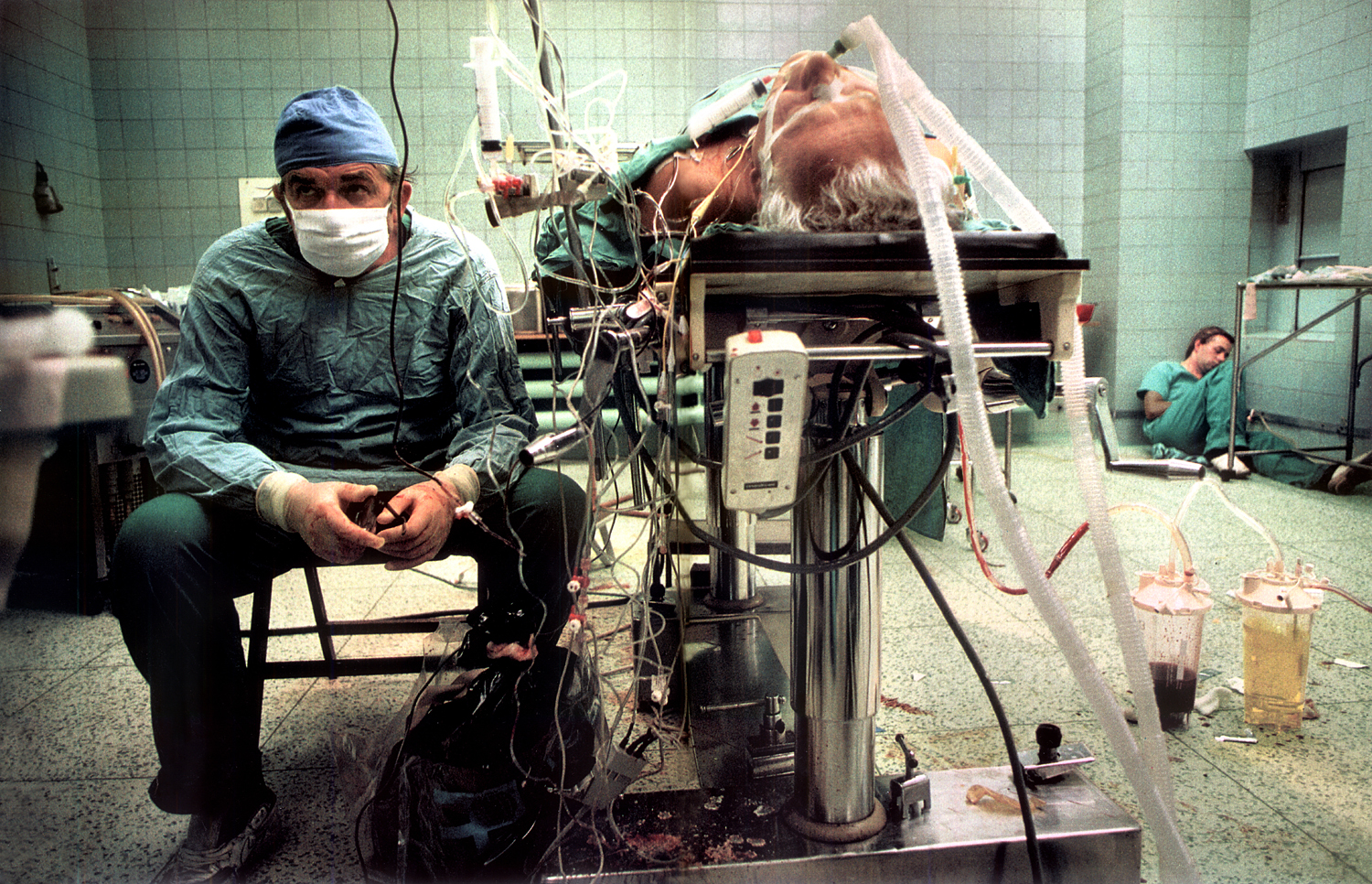
W 15 rocznicę śmierci wspominamy Profesora Zbigniewa Religę - naszego Wielkiego Nauczyciela i Mentora. Wybitnego kardiochirurga, który dokonał pierwszego udanego przeszczepu serca w Polsce. Pomysłodawcę i twórcę polskich protez serca, założyciela Fundacji Rozwoju Kardiochirurgii.
Miło nam poinformować, że Fundacja Rozwoju Kardiochirurgii im. prof. Zbigniewa Religi otrzymała wsparcie finansowe od Fundacji JSW.




Akcje: PoznajGwiazde.pl
Fundacja Rozwoju Kardiochirurgii
im. prof. Zbigniewa Religi
ul. Wolności 345a,
41-800 Zabrze